Transverse Zeeman Stabilization – What It Is
By utilizing beat frequency stabilization control based on the Zeeman effect, the QQD series achieves:
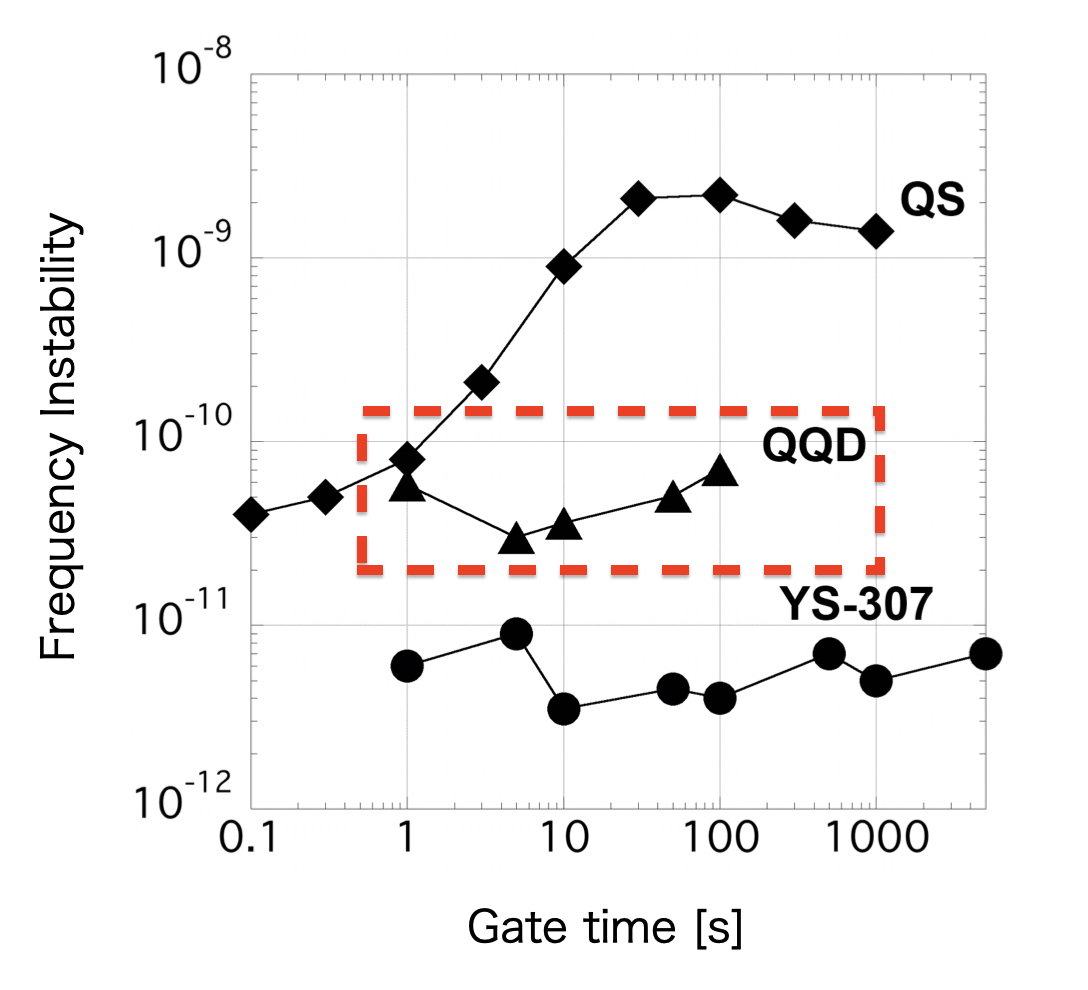
- Frequency stability of 10-10
- Orthogonal two-frequency output at an optimal beat frequency for heterodyne interferometer light sources
Principle of Transverse Zeeman Frequency Stabilization
Transverse Zeeman frequency stabilization is a method that stabilizes the oscillation frequency using the Zeeman effect induced by a magnetic field.
When a magnetic field is applied perpendicularly to the laser’s optical axis, a single oscillation mode splits into two polarization states (horizontal and vertical) due to the Zeeman effect.
Because the optical cavity length differs slightly for the horizontal and vertical polarizations due to the anisotropy of the cavity mirrors, their oscillation frequencies also separate slightly. Frequency stabilization is achieved by locking this difference in oscillation frequencies (the beat frequency) to a reference frequency generated by a crystal oscillator.
Overview of Transverse Zeeman Frequency Stabilization
Based on the QQD system configuration (Fig. 1), the stabilization control operates as follows:
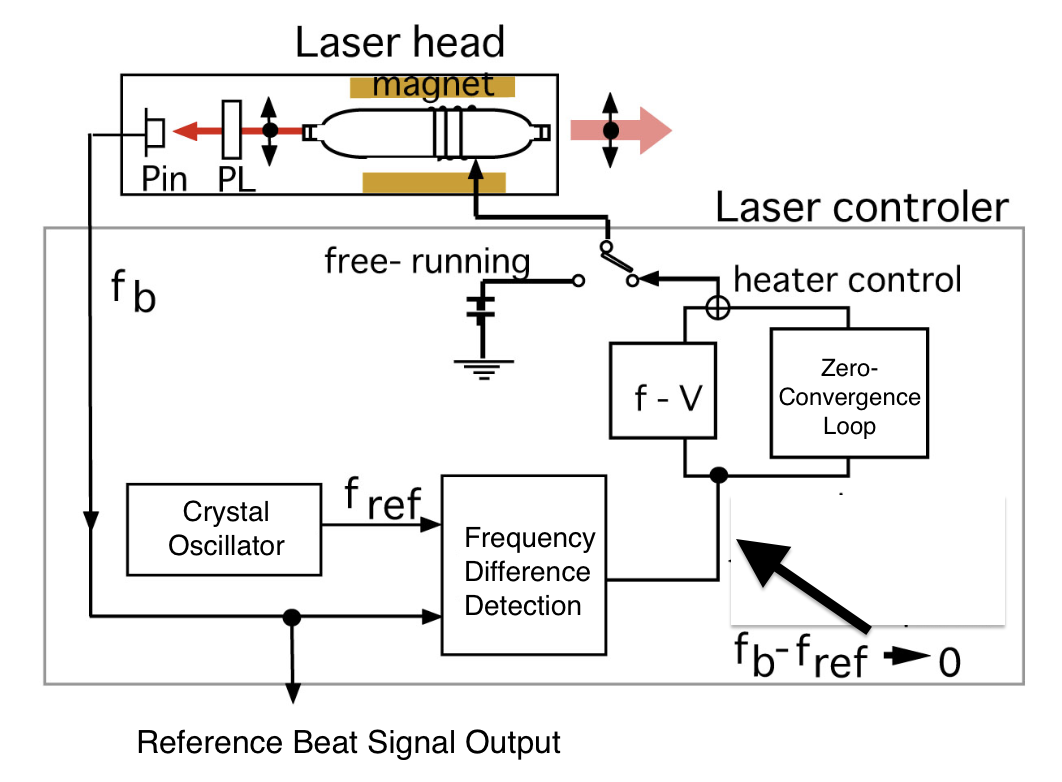
- The horizontal and vertical polarizations generated by the Zeeman effect are superimposed by a polarizer (PL), and the beat frequency (fb) is detected by a PiN photodiode (Pin).
- The fb is compared with a reference signal frequency (fref) generated by a crystal oscillator using a frequency difference detection circuit. Heater control is then applied so that the difference (fb – fref) becomes zero.
Technologies that Support Stabilization
Control based on frequency, not intensity
Because the physical quantity used for control is frequency, it provides more stable control compared to intensity-based stabilization methods, as it is unaffected by contamination on the cavity mirrors or photodetectors. By handling the control signals as frequencies as much as possible, the system is less susceptible to characteristic changes caused by temperature fluctuations in the control circuit’s electrical components.
Two-stage stabilization robust to ambient temperature variation
The QQD series uses a two-stage control scheme: (1) conventional proportional control, and (2) a proprietary accumulative integral control. This locks the fb – fref signal to zero regardless of ambient temperature variations. With proportional control alone, the fb – fref signal fluctuates with ambient temperature changes (Fig. 2(a)).
The two-stage control is designed to minimize the impact of ambient temperature changes (Fig. 2(b)).
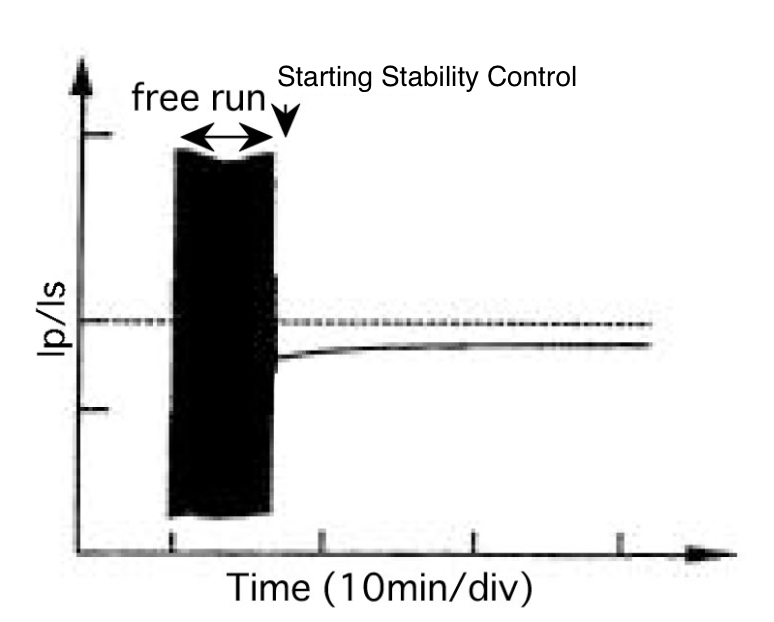
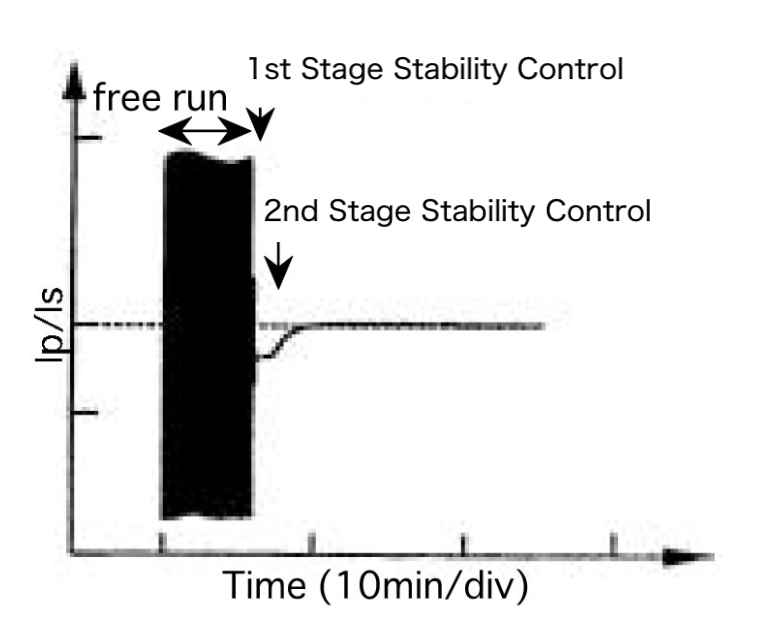
Fig. 2 Comparison of Stabilization Controls
Dual-heater architecture to broaden the operating temperature range
The QQD series features two heater systems: a main heater and a sub heater. The main heater performs the stabilization control, while the sub heater compensates for ambient temperature drift. This dual-heater design expands the effective operating temperature range of the two-stage control.
Our measurements confirm the effective operation of this two-stage control over a wide range of ±20 °C in ambient temperature fluctuations during control (starting from a 25 °C environment).
Excellent Frequency Stability
By utilizing the stabilization control technologies described above, the QQD series achieves a high stability of 10-10 across a wide range of averaging times (from 0.001 s to 100 s).